AccuRange 3000

The main sensor we use at the moment for environment modelling is the laser range finder AccuRange_3000, available in three different options: visible, infrared, infrared high Power.
(We use the visible laser and have built a deflection unit for this laser [see picture]. This device rotates with 2 revolutions per second and produces 720 range values per revolution.)
- Technical data
- Fixed Laser
- 5mW Class 3a (visible)
- 5mW Class 3b (infrared)
- 25mW Class 3b (infrared high power)
Measuring method: not known.
Accuracy: Single measurement approx. 5cm, because of high measurement rate (4-40 Mhz, depending on the distance) oversampling possible, accuracy up to approx. 1mm.
Range: 25cm up to 8m (visible laser)
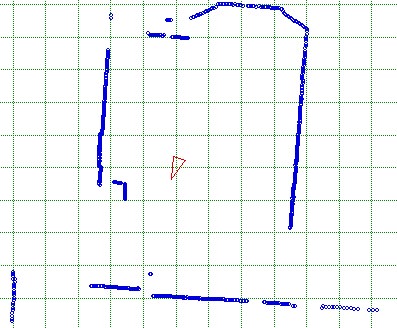
- Typical 360°-scan of AccuRange 3000:
- (Robot position marked by red triangle, range readings by blue points; distance grid indicates steps of 1 m)
- Vendor
- Acuity Research, Inc.
- 3475 Edison Way, Unit P
- Menlo Park, CA 94025
- tel: 650-369-6782
- fax: 650-369 6785
- (Bob Clark, e-mail: rrc@acuityresearch.com)