![[Logo]](/aglogo.gif)

Phoenix Mobile Experimentalplattform
Arbeitsgruppe Robotik & Prozessrechentechnik
![]()
![]()
![]()
Pan/Tilt-Unit
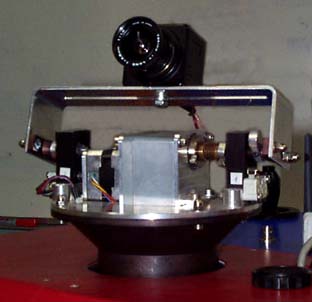 Ein mechanischer Schwenk/Neigekopf ermöglicht Phoenix die flexible Kontrolle seines Sichtfeldes im Bereich von 180 Grad (Schwenken) und 90 Grad (Neigen).
Ein mechanischer Schwenk/Neigekopf ermöglicht Phoenix die flexible Kontrolle seines Sichtfeldes im Bereich von 180 Grad (Schwenken) und 90 Grad (Neigen).
Die Schrittmotoren der Einheit werden durch ein spezielles Microcontroller-Board angesteuert, das seine Kommandos über eine serielle Schnittstelle von einem der Roboter-Hostrechner erhält.
Durchführung: Robin Wißbrock
Letzte Änderung: 14.01.00, Joachim Weber